Configurar el funcionamiento de una cinta transportadora mediante un variador conectado a Profibus-DP de la siguiente manera:
Al accionar el pulsador de marcha arrancaremos la cinta al 25% de la velocidad del motor, y al detectar un sensor el elemento que transporta la cinta, el motor acelerará hasta el 100% de su velocidad. Al llegar la pieza al final (detectado por otro sensor), motor parará durante 10”, para posteriormente invertir el sentido de giro del y funcionando a la velocidad del 50% del motor, deteniéndose la cinta cuando la pieza vuelva a ser detectada por el primer sensor. El estado de la cinta transportadora estará en todo momento señalizado por lámpara (una para el paro, otra para la marcha, una para cada sentido de giro, y una para cada velocidad distinta del motor.)
Las entradas que controlan la cinta transportadora estarán ubicadas en un módulo de periferia descentralizada o autómata programable (el que se desee). El estado de la cinta transportadora se visualizará desde el autómata maestro.
VARIADOR MICROMASTER 4
El módulo de comunicaciones Profibus-DP sirve para la conexión de convertidores de la serie MICROMASTER4 a bus Profibus-DP. Se pueden conectar hasta un total de 126 convertidores a un maestro.
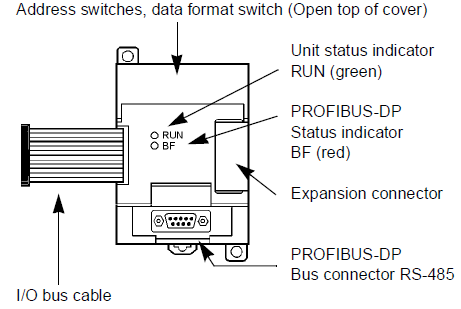
Para informar sobre el estado actual de funcionamiento el módulo de comunicación dispone de un indicador led tricolor ( verde, naranja, rojo) que nos indica el estado operativo del módulo.
La alimentación de tensión se produce mediante el conector de sistema del convertidor.
La conexión al sistema Profibus se produce mediante un conector tipo D de 9 pines según la norma Profibus
El módulo de comunicaciones soporta velocidades de 9.6kbps hasta 12Mbps.

Comunicación con Micromaster4 mediante Profibus-DP
El control del micromaster4 se produce por el canal cíclico de PROFIBUS-DP. La estructura de datos útiles para el canal cíclico se define en el perfil PROFIDrive y se designa como PPO (objeto parámetros-datos de proceso).
Estructura de datos útiles según PPO
La información que se necesita se transmite mediante un “telegrama” desde el autómata al variador y viceversa. La estructura de datos útiles en la comunicación de datos útiles se subdivide en dos áreas que se puede transmitir en cada telegrama:
El área de parámetros (PKW) para leer y escribir valores de parámetros del variador. El área de datos de proceso (PZD) es decir palabras de mando y valores de consigna, así como información de estado y valores reales. A la hora de configurar la comunicación, la estructura de datos útiles se designa como (Parameter Process Data Objects) PPO. Existen cinco tipos de PPO en función de la cantidad de datos de parámetros y de proceso que se empleen. PPO1, PPO2, PPO3, PPO4, PPO5. Para simplificar el control, nos centraremos en dos perfiles: PPO1 y PPO3.

- PPO1: Subdivisión del protocolo que permite en un solo telegrama controlar el variador (enviar consigna, arrancar o parar e indicar el sentido de giro), y además leer o escribir un solo parámetro cada vez. Necesita para su funcionamiento 12 bytes de entradas y 12 bytes de salidas en periferia del autómata.
- PPO3: Subdivisión de que solo permite controlar el variador, sin posibilidad de modificar ni leer parámetros del mismo por comunicaciones. Necesita para su funcionamiento solo 4 bytes de entradas y 4 de salidas en periferia.
El tipo de PPO utilizado se configura en el Software de Step7, al incorporar el variador a la red.
Los datos del proceso y de parametrización, se subdividen en palabras. Su utilidad es la
siguiente:
PKW. Área de parámetros. Permiten al usuario acceder a través del bus de campo a todos los parámetros del convertidor, de forma que se puede leer/escribir de forma remota dichos parámetros.
- PKE: Identificador de parámetro. Esta palabra se usa para indicar al convertidor un número de parámetro, y la acción que debe de realizar con el mismo, ya sea leerlo o modificarlo. La estructura de este parámetro es l
- IND: Subíndice de parámetro. Esta palabra indica, si el parámetro del variador indicado en PKE lo tuviera, el número del subíndice del mismo. En micro/midimaster no existen actualmente índices, por lo que su valor siempre será 0. En caso de que existiese algún parámetro con subíndices, el número de los mismos se almacena en el byte alto de la palabra, es decir, en los bits de 8 al 15, permaneciendo el byte bajo a 0.
- PWE: Valor del parámetro, en el caso de que deseemos escribirlo. Esta doble palabra de 32 bits almacena un valor que, en el caso de que estemos escribiendo un parámetro indica el dato al que deberemos escribirlo. En caso de lecturas de parámetros, aunque coloquemos cualquier valor en esta doble palabra no tendrá efecto. Es importante tener en cuenta la cantidad de decimales que acepta dicho parámetro. Existen parámetros con dos decimales y parámetros con uno, por lo que es importante consultar el manual antes de introducir este parámetro.
PZD. Área de proceso. Se utiliza para transmitir palabras de mando o valores de consigna del maestro al convertidos o palabras de estado y valores reales o de medida del convertidos al maestro. Los datos se estructuran de la siguiente forma:
- PZD1: Palabra de control. Esta palabra determina como debe de comportarse el variador. Cada uno de los bits que la componen indicará un estado del mismo.
- PZD2: Consigna de frecuencia. En esta palabra se indica en hexadecimal el valor de consigna de frecuencia al que deseamos que marcha el variador. Es importante tener en cuenta que este valor no se almacena en ningún parámetro del mismo, por lo que se puede hablar de una consigna en local (ya sea a través de analógicas, o por frecuencias fijas), y una consigna de comunicaciones. El variador solo obedecerá a una de ellas. El valor de la frecuencia esta escala según lo siguiente:
De 0 a 16384 (4000 en hexadecimal), que corresponde al 100% de la frecuencia que esté almacenada en el parámetro del variador. Por defecto este valor es 50.0 Hz, aunque podemos modificarlo en cualquier momento, variando nuestra escala de consignas. Suponiendo un valor de 50.0 Hz en el parámetro, para valores superiores en el HSW de 16384 obtendríamos frecuencias superiores a 50 Hz. Así, el valor 32767, que es el valor positivo mayor que se puede introducir en una palabra, equivale a 100 Hz. Si sobrepasamos este número (valores mayores de 32767), obtendremos porcentajes negativos, y por consiguiente frecuencias negativas. El valor debe de expresarse en hexadecimal. Si hemos enviado el telegrama correctamente según lo explicado en el apartado anterior, unos milisegundos después el variador deberá contestar un telegrama.
PROGRAMACIÓN CON STEP 7
El variador micro/midimaster para poder gobernarse correctamente desde comunicaciones debe de seguir un orden en la recepción de su palabra de control. Primeramente, para poder estar preparado para arrancar a través de comunicaciones, debe de recibir la palabra de control o de habilitación:
- 447E
Partiendo de este estado, cambiando el último bit arrancaremos el variador, es decir:
- Para girar a derechas: 447F
- Para girar a izquierdas: 0C7F
Si una vez en marcha deseamos parar el variador, podemos realizar tres tipos de parada: la normal (447E), la parada libre (447D), y la parada rápida (447B). En cualquier caso, siempre deberemos de partir de un estado de parada normal (OFF1). Por lo tanto, si realizamos parada OFF2 o OFF3, a continuación, y durante algunas décimas de segundo, es necesario enviar la parada OFF1.
Indicar como apunte final que si deseamos realizar movimiento mediante jogging, la palabra de control debe de adoptar lógicamente el valor:
- Para girar a derechas: 057F
- Para girar a izquierdas: 067F
En caso de querer leer o escribir parámetros en el variador, deberemos emplear el perfil PP01. Esto hará que mandemos los 8 bytes para leer/escribir y los 4 siguientes para controlar el variador. En los 8 primeros, utilizaremos los dos primeros para indicar el número de parámetro y la acción a realizar (leer o escribir) y en los otros 6 restantes los emplearemos para recibir el valor del variador (leer) o para colocar el valor que nosotros queramos escribir.
CONFIGURACIÓN Y PROGRAMA DEL EJERCICIO






CONFIGURACIÓN Y PROGRAMA DEL EJERCICIO

Insertamos la CPU y la CP

Le decimos que es el maestro

Insertamos el esclavo MICRO-MIDIMASTER que ocupa 4 bytes

En la primera linea insertamos 2 MOV y en uno le decimos que gire hacia la derecha al 25% y el MOV de abajo lo habilita

En la primera linea va al 100%, en la segunda lo paramos 10s y en la tercera arrancamos hacia la izquierda al 50%

Paramos y mandamos todas instrucciones al variador con la instrucción DP_SEND